




SLAM2000是飞马机器人开发的另一款创新性的行业级手持激光扫描仪。该设备采用半球形非重复扫描激光传感器,并结合旋转式万向节,实现了720°全景无死角的点云覆盖。通过增加视觉摄像头并融合视觉SLAM算法,它在结构较弱的场景中有效提高了3D重建的适应性。
搭载飞马机器人的行业级SLAM算法,SLAM2000真正实现了在各种场景下的卓越适应性以及高精度实时地图构建,为3D移动测量需求提供了一种高效且精确的解决方案。
slam2000配备即时点云结算,扫描所行即所见,所见即所得,集LiDAR定位、视定觉位、SLAM、GNSS等多技项术于一身。
slam2000设备支持手持、背包、单杆、静态等多种模式
三大升级
引入视觉SLAM辅助三维建图
SLAM2000首次引入了视觉相机,配合全新研发的视觉SLAM算法,能在激光SLAM基础上提供更多匹配特征点,有效避免因结构重复、匹配错误导致的误差,大幅提升弱结构特征场景建图能力,极大丰富SLAM2000的适用场景。
处理算法全面升级提高建图精度
SLAM2000全面升级SLAM算法,建图鲁棒性更高,可输出更高精度的成果数据,实现高效率、高精度的场景数据转化;赋色算法针对不同场景优化升级,输出的真彩点云更加清晰、细腻。
功能全面升级满足多行业需求
SLAM2000配置高性能计算模块,可在数据采集过程中同步实时建图,实现“所行即所见,所见即所得”。此外,SLAM2000不仅支持手持和背包模
式,还支持使用三脚架进行站式扫描,获取更高密度、更高精度的点云数据,以满足不同行业的使用需求。
六大特点
高性能硬件精选打造
SLAM2000使用了点频200kHz的行业级激光雷达,测量距离可达70米,非重复式扫描点云数据更均匀,搭配360°旋转云台,可实现720°全景式激光扫描;选用两颗1英寸CMOS传感器的高清广角相机,分别用于赋色和视觉SLAM,影像质量更清晰;内置了飞马自研的高精度惯导芯片,可大幅提高成果精度;搭载6T算力NPU高性能计算核心,可实现实时建图;采用512GB内置高速存储颗粒,数据存储更加稳定。

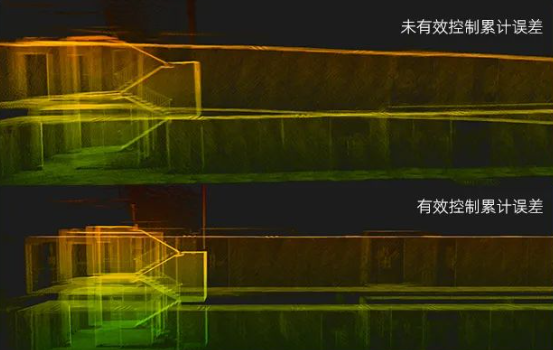
高精度成果输出
得益于自研的高精度惯导芯片,SLAM2000可有效抑制数据采集中的累计误差;全面优化的雷达标定算法和不断升级的行业SLAM算法,可确保SLAM2000在各种应用场景下输出高精度三维成果。
实时建图算法数据高效转化
搭载了高性能计算核心的SLAM2000,能在数据采集的过程中进行地图构建,在数据采集完成后直接输出成果数据,即实现实时建图,可应用于如应急救援等时效要求较高的应用场景。




多扩展适配更多场景
SLAM2000拥有Type-C、航插等多种外部接口,可外接电源、S-RTK1O0、背包等扩展模块,满足用户更多的应用需求。
可更换式智能电池手柄安全持久
SLAM2000使用更为安全的3000mAh可更换式智能电池手柄,可保证SLAM2000持续稳定工作95分钟。充电采用Type-C接口,标配65W快充设备,保证SLAM2000的电量补给。

案例分享