














SLAM100/slam2000 Data process (HandHeld Mode)
SLAM100 / SLAM2000 Raw Data
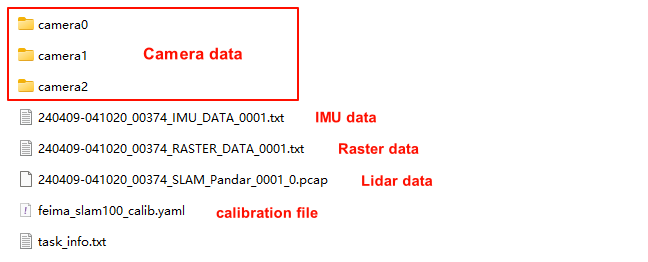
SLAM100:
The data collected by the SLAM 100 is stored on the device’s SD card, and the collected data packages are stored in a folder named “SN_XXXXX”. The raw data contains photo data, IMU file data, raster file data, laser file data, equipment calibration file etc. .
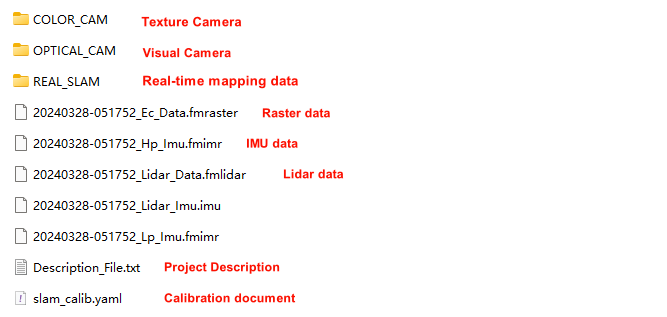
SLAM2000:
The data scanned by SLAM2000 will be saved in the onboard storage, and the collected data packages are stored in a folder named “SN_XXXXX”. The raw data contains Video data, IMU file data, raster file data, laser file data, equipment calibration file etc. .
Create Project
Click [New], set the project name and project path, the platform to select [Hand]
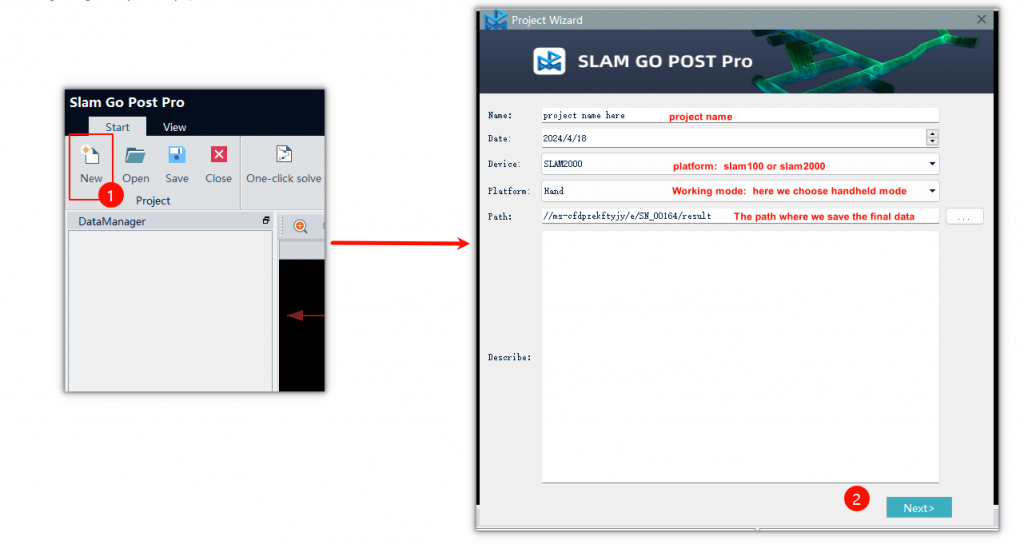
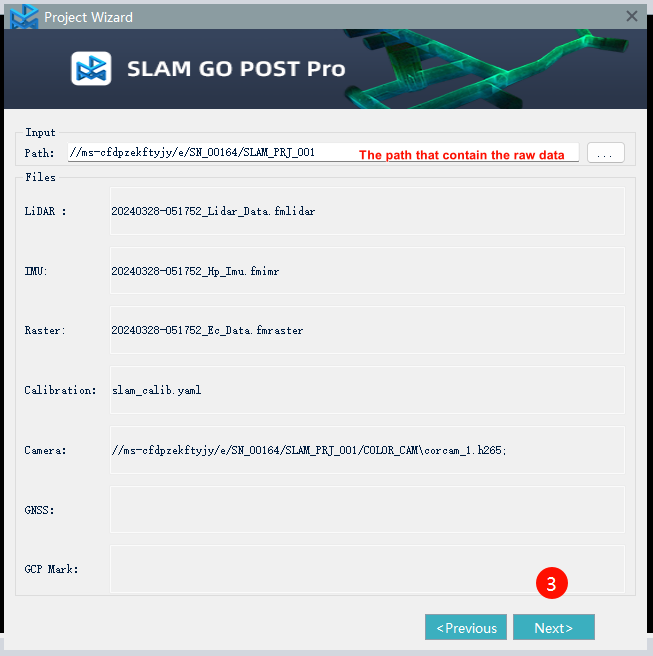
Click [Next], in the input path to select the folder where the original data, the software will automatically identify the data in the folder
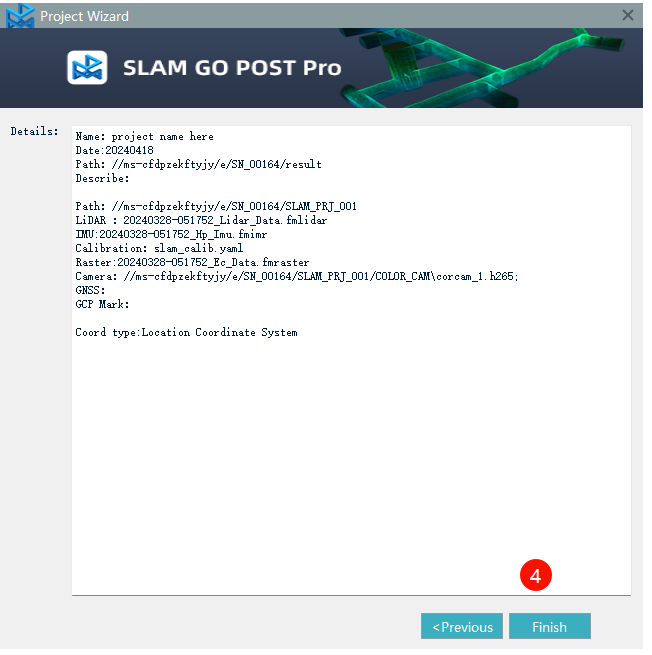
Click [Finish] to complete the project creation.
Import GCP (Optinal)
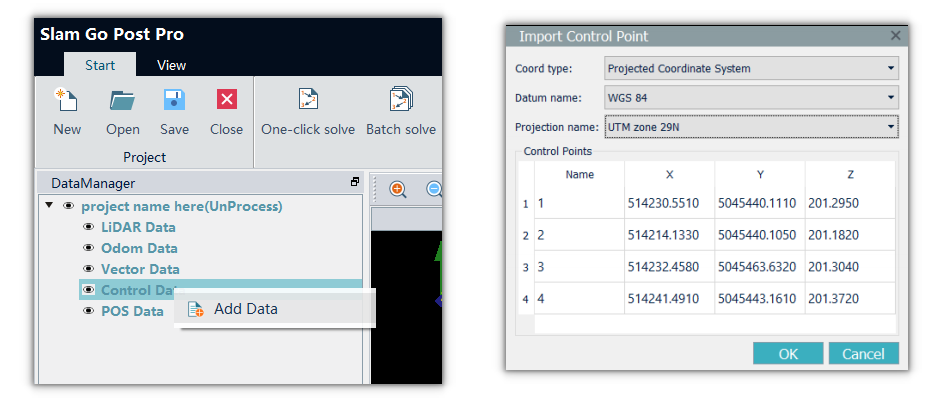
If there are control points in the data, we need to import them before starting the project processing.
Right-click [Control Data] in the DataManager window, select [Add Data], importing the organized GCP into the software. The software supports local coordinate system and the projected coordinate system.
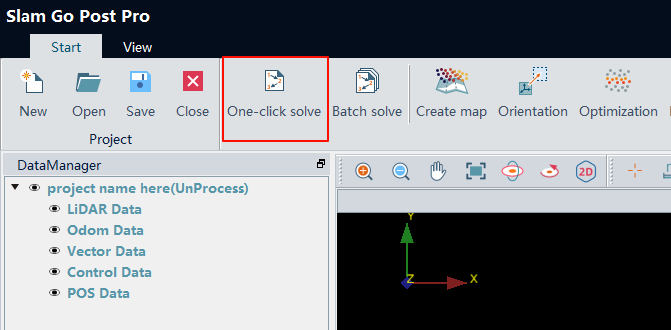
One-Click solve:
After creating the project , the easiest way to solve the data is use [one-click solve] button
In general, we can stick to the default parameters. If you want to colorize the point cloud, you can check the “Color Point Cloud” option. However, this will increase the processing time.
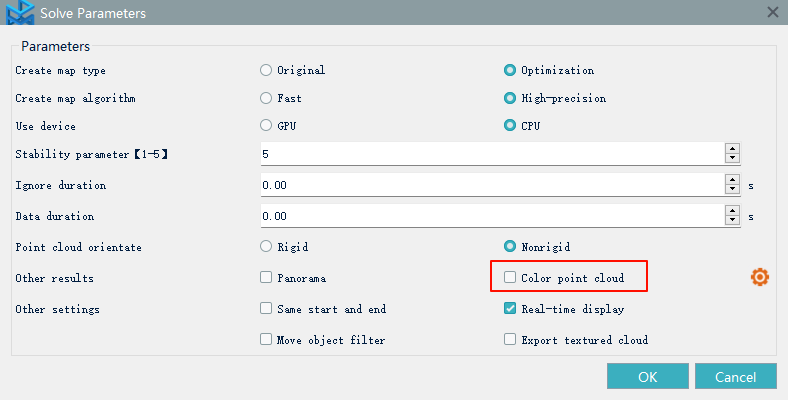
Once you click the [OK] button, the data processing starts immediately.
Basic project structure of slam100/slam2000
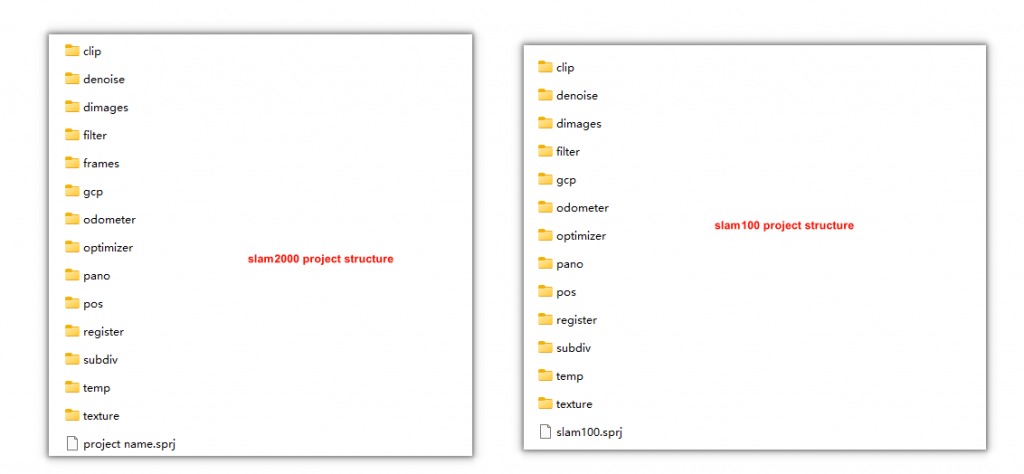
If you use the “one-click solve” method and select the “Color Point Cloud” option, the point cloud data will be saved in the “optimizer” folder and the “texture” folder. The “optimizer” folder contains the optimized point cloud, while the “texture” folder contains the colorized point cloud.
Add point cloud data to viewer
Once the data has been processed, we can add it to the viewer for observation
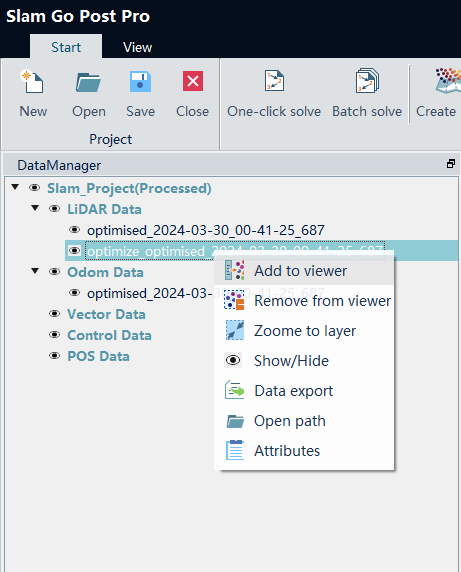
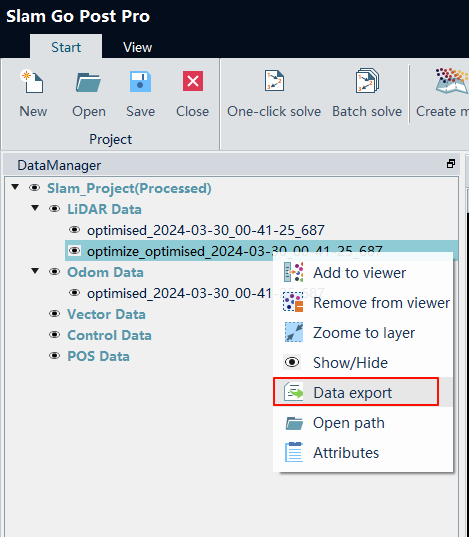
Data export
After confirming that the data is free of issues and suitable for production, we can export the data in LAS format.