














The term “Super Station RTK” refers to a GNSS RTK receiver device that utilizes SLAM (Simultaneous Localization and Mapping) technology for navigation measurements. In this device, traditional GNSS receivers are augmented with laser SLAM technology, leveraging SLAM’s powerful environmental perception and mapping capabilities to achieve high-precision pose navigation and accurate real-time point positioning.
In environments with GNSS signals, the RTK device primarily relies on GNSS signals for point positioning or layout and provides forward correction to the laser SLAM odometry. When entering areas without GNSS signals, the RTK device depends on laser SLAM for pose navigation, continuing to output high-precision location information.
Based on this technological direction, Feima Robotics proposes a solution for Super Station RTK using the SLAM2000 handheld laser scanner and the S-RTK100 multifunctional portable RTK module.
SLAM2000 System Introduction
The SLAM2000 is Feima Robotics’ next-generation handheld laser scanner, employing non-repetitive scanning laser sensors, in-house developed high-precision inertial navigation systems, and a 12-megapixel camera. It possesses the capabilities of high-precision point cloud mapping and accurate navigation positioning.

S-RTK100 System Introduction
The S-RTK100 is a small-sized GNSS receiver module independently developed by Feima Robotics. It utilizes a five-star sixteen-frequency board module and can be used in conjunction with SLAM products or independently as a GNSS receiver for data collection. It enables centimeter-level absolute precision data acquisition.

Super Station RTK mainly consists of a GNSS receiver, SLAM device, pole mount, and accompanying app, requiring no additional hardware devices.
1) Connect the RTK device, SLAM device, pole mount, and other components to assemble the Super Station RTK. Control and data collection can be managed using a smartphone app.
2) During initialization, ensure that the Super Station RTK is powered on in an area without GNSS obstruction. Use the smartphone app to configure CORS system settings, pole height, and other parameters. Once the RTK achieves a fixed solution, activate the SLAM device and create a new project.
3) During data collection, whether in areas with GNSS signals or entering areas without GNSS coverage, normal RTK data collection, tilt mode data collection, inverted mode data collection, etc., can be performed. Coordinate collection or layout can be conducted in areas with severe GNSS signal obstruction or complete absence of GNSS signals, such as under trees, under eaves, indoors, underground spaces, etc.
4) Export the collected coordinate data for further processing to generate the required surveying results.

As shown in the diagram above, the Super Station RTK performs position information collection in a normal outdoor environment (green trajectory) based on GNSS-acquired RTK data, while simultaneously correcting pole height and tilt using SLAM’s pose. If GNSS signals are obstructed due to tilt or inversion, the laser SLAM odometer can continue to navigate the pose.
Upon entering a GNSS signal-free environment (red trajectory), where GNSS signals are lost, laser SLAM can continue to navigate the pose and accurately obtain the coordinates of the points to be collected. When returning from a GNSS signal-free environment to an outdoor environment, data collection can continue seamlessly. If the GNSS signal-free area is large, it is possible to ensure the accuracy of coordinate collection by temporarily exiting outdoors to acquire GNSS data and then returning indoors. Alternatively, post-processing can be performed as needed to further enhance data accuracy.
Advantages
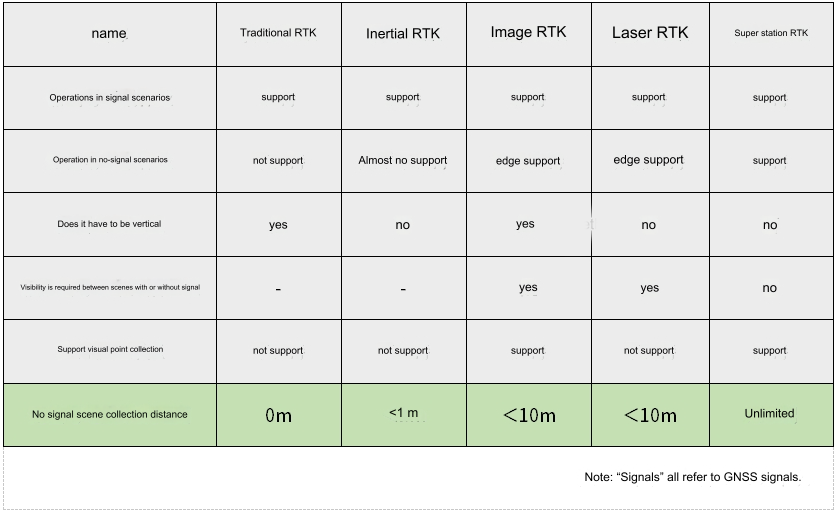
As mentioned earlier, the current methods relying on GNSS receivers and other sensors for RTK measurements mainly include traditional RTK, inertial navigation RTK, image-based RTK, and laser RTK.
Traditional RTK relies on GNSS receivers for coordinate measurements or layout; inertial navigation RTK incorporates inertial navigation devices for tilt measurements of the pole; image-based RTK utilizes a visual system for intersection ahead, collecting coordinates of the target points through images, or guiding point positioning; laser RTK conducts coordinate acquisition or layout of laser points through laser indication and ranging, and laser RTK also requires the use of an inertial navigation system. The various modes mentioned above can be combined and integrated with each other to achieve more application functions. The functional comparison of various RTK methods is shown in the table below.
Super Station RTK Testing
To validate the feasibility of the Super Station RTK, a combination solution of SLAM2000 and S-RTK100 was employed for testing. Data collection was conducted in the Beijing Baosheng Plaza area, covering ground buildings, objects, lobbies, and underground parking, with the aim of producing surveying results.
Baosheng Plaza comprises nine above-ground floors and one underground level, forming a ‘口’ shaped structure. Some areas have corridors, and the overall floor height is considerable. Additionally, there are physical awnings in the ground floor shops. Traditional RTK methods are inadequate for complete point acquisition in this complex environment and cannot directly perform indoor and underground measurements. Typically, additional equipment like total stations is required in conjunction with traditional RTK for measurement. However, utilizing the Super Station RTK solution allows for comprehensive measurement in a single operation, ensuring surveying accuracy.

Initialization
Mount the SLAM2000 + S-RTK100 onto a dedicated pole, power on the devices, and proceed with CORS settings, SLAM initialization, and other parameter configurations.
Data Collection
Once initialization is complete, you can proceed with data collection using the smartphone app. Whether in areas with GNSS signals or entering areas without GNSS coverage, the Super Station RTK can be used for regular measurements, tilt mode measurements, inverted measurements, etc. After data collection is complete, you can directly output a list of indoor and outdoor coordinate values.
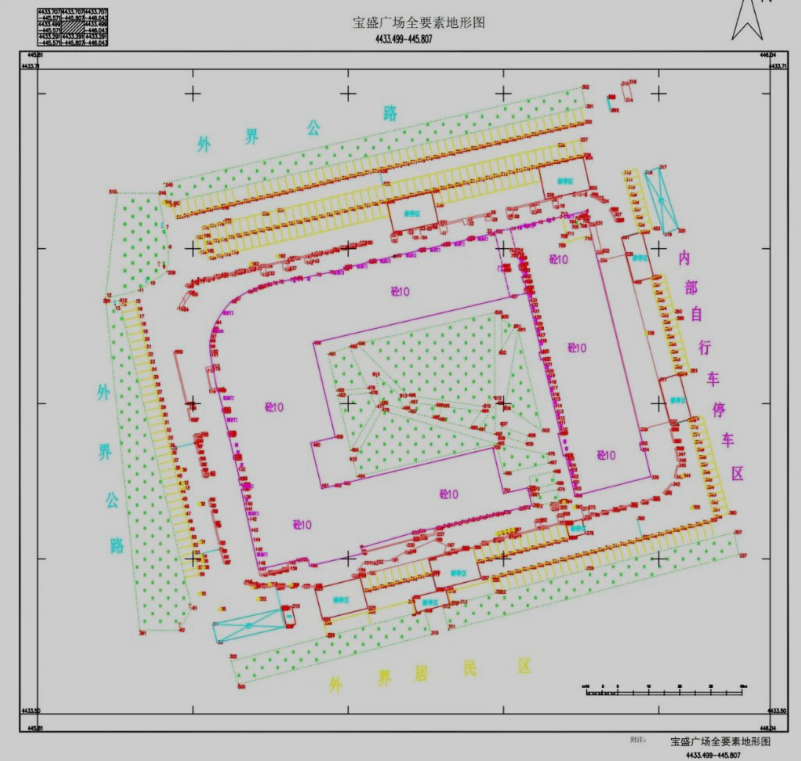
Drawing Surveying Results
The collected indoor and outdoor point data obtained using the Super Station RTK can be used to create line drawings and generate surveying results. Within the same dataset, the interior of buildings and the underground parking can be directly included in the drawing, providing a complete set of drawings for the Baosheng Plaza area, both above and below ground.
Summary
Super Station RTK is a new SLAM+RTK working mode introduced by Feima Robotics, primarily used for obtaining absolute coordinates or layout in normal environments and in scenarios where GNSS signals are unavailable or obstructed. Leveraging SLAM technology effectively simplifies the operation process of traditional RTK, expands the application scope of RTK, and provides a new equipment choice for engineering surveying.