














With the rapid development of urban construction in China, the informatization of underground spaces in cities is increasingly being valued by industry managers. Underground space data is an indispensable and important component of urban construction. Achieving the three-dimensional informatization of underground spaces, constructing three-dimensional cities, and providing scientific and technological support for the rational development of urban underground space resources has become one of the most effective measures to solve urban problems. Therefore, studying efficient, high-precision, and fully-elemental methods of obtaining and expressing three-dimensional information of underground spaces is of crucial importance for promoting urban construction and improving the level of urban informatization.
Challenges and bottlenecks in measurement
Urban underground spaces have unique characteristics, and conventional measurement methods often encounter many technical challenges and bottlenecks during surveying.
- The underground space has a complex structure with many different types of constructions, making it difficult to obtain comprehensive data using a single technique.
- It is difficult to directly use GNSS for underground space measurements, and there is an urgent need for a new data acquisition method to replace traditional techniques that are highly dependent on GNSS and other technologies.
- The available time for measuring the underground space is limited, requiring an efficient and convenient measurement method. Public open spaces such as subways and underground shopping malls are often crowded with people and vehicles, which can significantly affect traditional measurement and three-dimensional laser scanning methods. Measurements need to be carried out during times of low human traffic or at night. For non-public spaces, such as civil air defense projects and underground municipal facilities, strict entry review is required. Permission from management departments is needed for each measurement, and the timing of measurements needs to be strictly controlled.
SLAM100 handheld LiDAR scanner
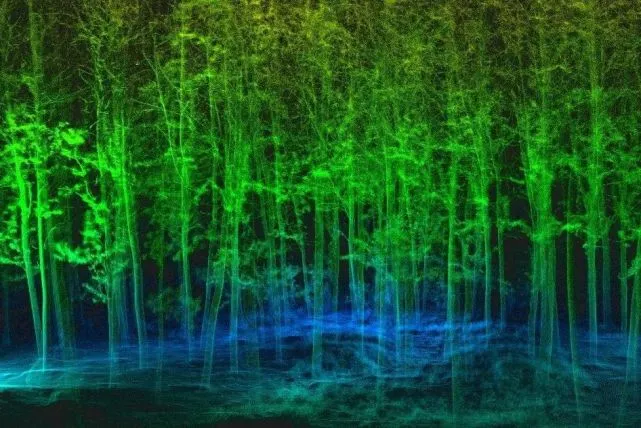
The SLAM100 handheld LiDAR scanner is a cutting-edge technology that provides high-precision and high-efficiency data acquisition for urban underground space. It uses a multi-sensor fusion positioning system and a real-time simultaneous localization and mapping algorithm to achieve accurate and efficient 3D scanning of underground space. The device is lightweight, portable, and easy to operate, making it an ideal tool for data acquisition in urban underground space.
The SLAM100 handheld LiDAR scanner is equipped with a high-performance laser scanning system, which enables it to capture high-density and high-precision point cloud data. The point cloud data can be directly output into various formats, such as .las, .ply, and .xyz, and can be imported into various 3D modeling software for further processing and analysis.
In addition, the SLAM100 handheld LiDAR scanner is equipped with a high-resolution camera system, which enables it to capture high-quality color images of the scanned area. The color images can be directly integrated into the point cloud data, providing users with a comprehensive and intuitive understanding of the scanned area.
Overall, the SLAM100 handheld LiDAR scanner is a powerful and efficient tool for urban underground space data acquisition, and is widely used in fields such as urban planning, construction, transportation, and geological surveying.
Software Algorithm
SLAM GO is a mobile app that is compatible with the SLAM100 handheld LiDAR scanner. It wirelessly connects to the device and supports real-time data display, 2D/3D and slice display, and project management. It automatically synchronizes with cloud-based project information, displaying job time, location, project overview, data summary, and other details. The app also enables firmware upgrades and device maintenance.
SLAM GO POST is a PC-based application software based on the Feima Drone Manager, which provides data post-processing, color point cloud production, data stitching, data optimization, browsing, and measurement functions. It supports one-click point cloud calculation, real-time viewing of the calculation progress, and can produce high-precision colored and optimized point clouds and panoramic images by importing the data folder of the collected project. The software also has an automatic control point recognition function, which can directly produce result data with absolute coordinates.

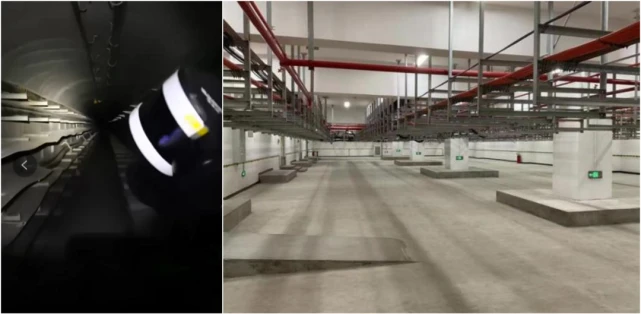
Underground parking garage
The poor line of sight and complex structure of underground parking garages make it difficult to collect data using conventional instruments for 3D modeling. However, 3D laser scanning technology uses non-contact measurement methods to accurately acquire the spatial geometry information of the measured object. Its dense point cloud data can quickly reconstruct a three-dimensional model of the object, allowing for precise measurement of every corner of the underground garage and achieving accurate positioning inside the parking lot.

Civil air defense engineering
The civil air defense project is a special underground building with protective requirements, forming a network of tunnels. In the early days, it was difficult for relevant departments to have a comprehensive and accurate grasp of the basic information of civil air defense projects. With the advancement of technology, supplementing the basic information of civil air defense projects has become a key task for relevant departments. The use of mobile handheld SLAM scanners can achieve continuous scanning and eliminate the stitching process, enabling the fast acquisition of basic data for old civil air defense projects.

Subway tunnels
The subway tunnel is an important part of the urban rail transit system. As an underground transportation facility, it often presents challenges for surveying and mapping due to its narrow space, complex structure, and limited lighting conditions. Traditional surveying methods may have limitations in terms of accuracy and efficiency. However, with the development of 3D laser scanning technology, it has become possible to obtain high-precision data of subway tunnels quickly and accurately. This technology can provide a comprehensive understanding of the tunnel’s structural information, deformation, and potential risks, which is essential for ensuring safe and efficient operation of the subway system.

The municipal underground pipeline corridor
The municipal underground pipeline corridor refers to the underground space reserved for urban infrastructure pipelines, such as water supply, drainage, electricity, and communication. Due to the complexity of the pipeline layout and the difficulty of data collection, traditional surveying and mapping methods are not efficient. However, 3D laser scanning technology can accurately and quickly obtain the spatial information of underground pipelines, and generate a high-precision 3D model. This technology can greatly improve the efficiency and accuracy of the pipeline corridor construction, maintenance and management.
SLAM100 Underground Space Informatization Solution
SLAM100 provides an effective solution to the measurement of complex underground spaces, irregular structures, and fragmented structures. Compared to traditional GNSS receivers, total stations, and static scanners, it has the following advantages:
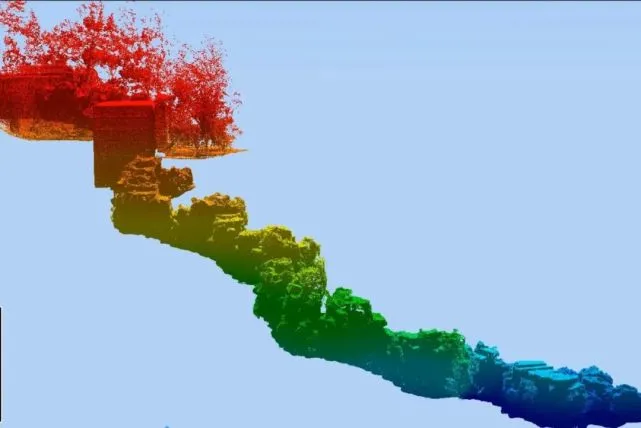
- The point cloud data structure contains rich information and can scan and record all structures within the line of sight. For some obstructed structures, they can be bypassed and scanned around the periphery to obtain complete data.
- It can continuously obtain point cloud data of underground spaces and connect the three-dimensional point cloud data of different structures, rooms, and orientations in a complete spatial range, which is intuitive and clear for data quality check, integrity check, and logical structure check.
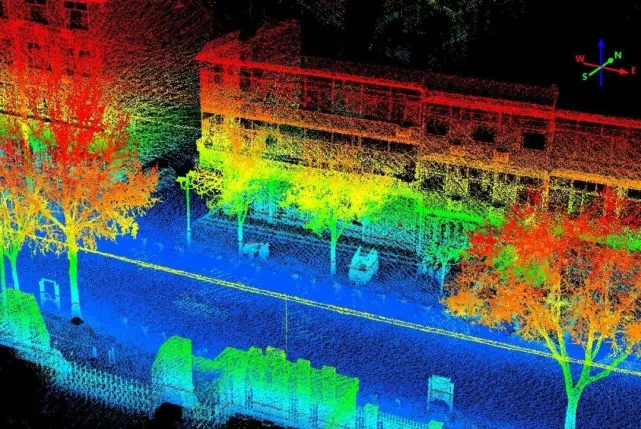
- The 3 panoramic cameras provided by SLAM100 can automatically match images with point clouds to generate color point clouds. Based on the scanned structural information and the colors and textures of actual underground structures, the color point clouds provide intuitive reference for subsequent 3D modeling, structural vectorization, and structural attribute identification. Especially for measuring fine textures and irregular structures, color point clouds can greatly reduce the workload of subsequent modeling and improve work efficiency.
Data acquisition and computation
Route planning and data collection: The collection personnel will inspect the area and understand the layout of parking lot exits and access ways in order to plan the most convenient and reasonable scanning route to obtain data. The route planning and collection follow the following points: ① Obtain the most complete parking lot point cloud data with the shortest possible route; ② Closed-loop collection is essential; ③ Obtain data behind occlusions, such as walls behind fire doors; ④ During collection, try to avoid moving vehicles and pedestrians to ensure the quality of point cloud data. The field collection process takes about 15 minutes and covers an area of approximately 4300 square meters.

Data processing: The raw data is imported into SLAM GO POST, with the options of “high-precision point cloud mode”, “point cloud map”, and “colored point cloud” selected. The data is processed with one-click, resulting in a high-precision colored point cloud and local panoramic images. The data processing takes about 40 minutes, including denoising, optimizing the colored point cloud, and generating the panoramic images.
Model reconstruction and rendering
3ds MAX 2022 has powerful point cloud data loading capabilities, which can directly and massively load las/rcp format point clouds. It provides different point cloud rendering methods to facilitate the identification of different building outlines, roads, and parking space boundaries by internal staff, enabling fast and accurate model reconstruction. This case uses 3ds MAX 2022 software for modeling, taking about 8 hours.
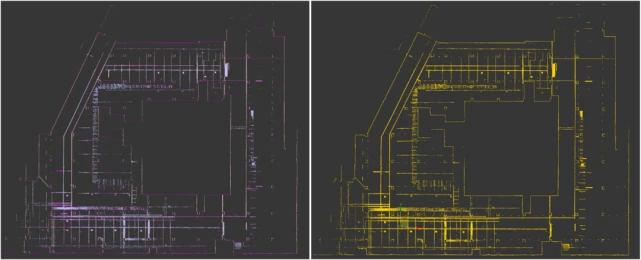
1) First import the point cloud into 3ds MAX and use BOX to clip the point cloud to display various building outlines in the underground garage as much as possible. For buildings with unclear outlines, you can drag and change the size of BOX to re-clip the point cloud. The clipped point cloud clearly shows the outline of the underground garage.
2) Reconstruct the main Mesh models of pillars, beams, walls and other structures based on the trimmed point cloud. The dimensions of similar structures in the underground garage are consistent. By using the array function in 3ds MAX, reconstruction of models for similar structures can be quickly completed to improve work efficiency. Compared with modeling based on existing vector maps or images, reconstructing models based on reference point cloud maps can ensure model scale and accuracy while presenting detailed features of different types of structures in the point cloud to avoid missing details or errors in the model.
SLAM100 Achievement Exhibition

Geographic Information