













SLAM, que significa «Simultaneous Localization and Mapping» (Localización y Mapeo Simultáneos), es una tecnología crucial utilizada en sistemas autónomos como robots móviles y vehículos no tripulados. Su propósito es permitir que los robots se localicen en tiempo real en entornos desconocidos mientras construyen simultáneamente un mapa sin conocimiento previo del entorno. SLAM desempeña un papel significativo en la navegación autónoma y la percepción del entorno.
Principio de Implementación: La implementación de SLAM se basa en la fusión de datos de sensores, filtros probabilísticos y algoritmos de optimización. Los sensores comúnmente utilizados incluyen LiDAR, cámaras, unidades de medición inercial (IMUs) y odometría.
- Fusión de Datos: El robot recopila información ambiental de múltiples sensores, como LiDAR para medir obstáculos y cámaras para obtener información visual. Los algoritmos SLAM fusionan estos datos de sensores para obtener una representación más precisa y completa del entorno.
- Procesamiento Frontal: En la etapa de procesamiento frontal, los algoritmos SLAM detectan y emparejan puntos característicos, como esquinas y líneas, para seguir su movimiento y estimar la posición (pose) del robot, que incluye la posición y la orientación.
- Optimización Posterior: Los algoritmos SLAM utilizan técnicas de filtrado probabilístico u optimización de gráficos para optimizar la trayectoria del robot y el mapa construido. Estos algoritmos de optimización ayudan a reducir los errores de medición del sensor y los errores acumulativos en la estimación del movimiento, lo que conduce a mapas más precisos y estimaciones más exactas de la posición del robot.
«Aplicaciones en la Industria de Topografía y Cartografía: La tecnología SLAM encuentra amplias aplicaciones en la industria de topografía y cartografía, especialmente en entornos interiores o situaciones donde los métodos de topografía tradicionales son imprácticos o prohibitivos en costos. Ofrece una solución eficiente y económica para tareas de cartografía.
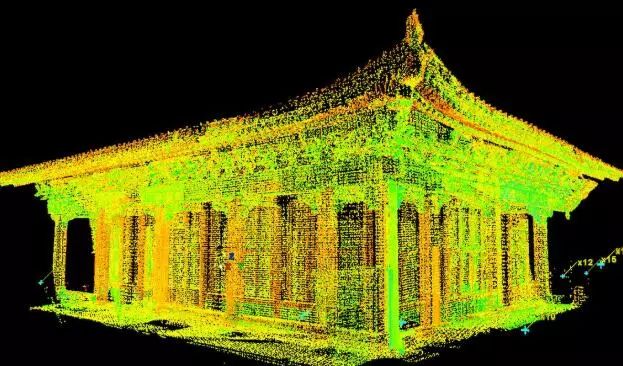
- Mapeo de Edificios e Interiores: SLAM se utiliza para cartografiar y modelar espacios interiores de edificios. Robots móviles o drones equipados con LiDAR y cámaras pueden explorar y cartografiar de manera autónoma el interior de entornos desconocidos.
- La tecnología SLAM ha experimentado varias etapas de desarrollo en el campo del mapeo de edificios e interiores. Con los avances en la tecnología de sensores y algoritmos, SLAM se ha vuelto más potente y ampliamente utilizado en estas aplicaciones. A continuación se presentan las principales etapas de desarrollo de SLAM en el mapeo de edificios e interiores:
- Etapa Inicial: En sus primeros días, la tecnología SLAM dependía de sensores relativamente simples, como telémetros láser y codificadores. Estos sensores proporcionaban información ambiental limitada, y los algoritmos eran relativamente sencillos. Sin embargo, debido a la precisión de los sensores y las limitaciones de los algoritmos, SLAM enfrentaba desafíos en la posicionamiento y mapeo en entornos de gran escala y complejidad.
- Sensores Diversos: Con el avance de la tecnología de sensores, los sistemas SLAM modernos utilizan una variedad de sensores, que incluyen LiDAR, cámaras RGB-D, unidades de medición inercial (IMUs) y cámaras convencionales. La fusión de múltiples sensores permite a SLAM obtener información ambiental desde diferentes perspectivas, mejorando la precisión y estabilidad de la localización y el mapeo.
- Auge de Visual SLAM: Visual SLAM, que utiliza cámaras para capturar información ambiental, surgió como una rama esencial en el campo de SLAM. En comparación con el SLAM tradicional basado en LiDAR, el visual SLAM es relativamente rentable y fácil de implementar. Además, el visual SLAM proporciona una información visual rica, como puntos característicos y estructuras de escena, lo que lo hace ventajoso para entornos interiores. Además, el desarrollo del aprendizaje profundo ha mejorado el rendimiento en tiempo real y la precisión del visual SLAM.
- Mejora en el Rendimiento en Tiempo Real y Precisión: Con el avance del hardware computacional y la optimización de algoritmos, la tecnología SLAM ha mejorado significativamente su rendimiento en tiempo real y su precisión. Los sistemas SLAM modernos pueden lograr la localización y el mapeo en tiempo real en un corto período, proporcionando información de localización y mapeo de alta precisión en la mayoría de los escenarios.
- Aplicaciones en la Navegación en Edificios e Interiores: La aplicación de la tecnología SLAM en el mapeo de edificios e interiores se ha expandido hacia los dominios de navegación y posicionamiento. Robots o drones basados en SLAM pueden navegar de manera autónoma en entornos interiores, crear planos de planta y ayudar a los usuarios a encontrar rápidamente ubicaciones específicas, mejorando la eficiencia y precisión de la navegación en interiores.
- Integración con Modelado de Información de Edificios (BIM): La integración de la tecnología SLAM con el Modelado de Información de Edificios (BIM) ha hecho que el mapeo en interiores sea más completo y preciso. SLAM se puede utilizar para crear rápidamente modelos BIM iniciales, mientras que la información de BIM ayuda a SLAM en el reconocimiento de características del entorno y la construcción del mapa, formando un sistema cerrado mutuamente complementario.
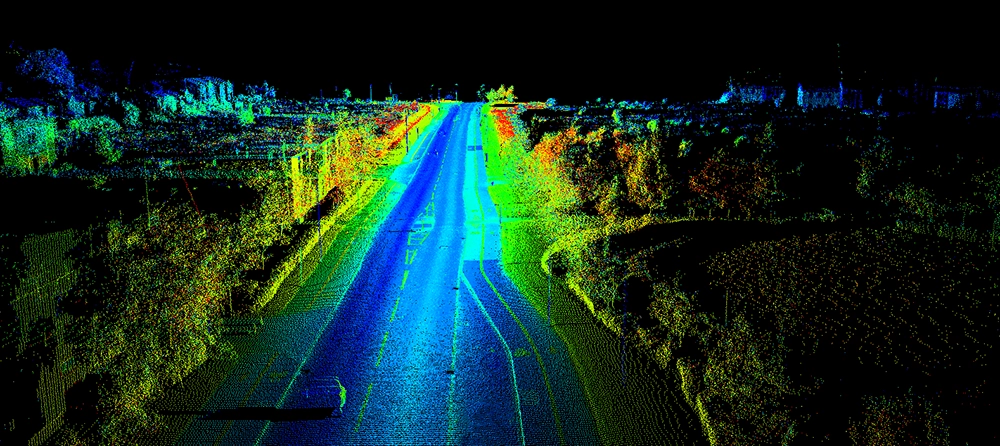
- Vehículos Autónomos: En la conducción autónoma, la tecnología SLAM es esencial para lograr la auto-localización y actualizaciones de mapas en tiempo real. Al fusionar datos de LiDAR, cámaras y otros sensores, los vehículos pueden percibir el entorno circundante y planificar rutas óptimas.
- Mapeo de Minas Subterráneas y Túneles: En entornos subterráneos peligrosos o de difícil acceso, SLAM se puede utilizar para la exploración y cartografía autónomas por robots o drones, ayudando a comprender mejor el entorno y planificar operaciones.
- Monitoreo Ambiental: SLAM se puede aplicar para monitorear y cartografiar los impactos de desastres naturales como inundaciones, incendios y terremotos. Drones o robots móviles pueden ingresar a áreas afectadas por desastres para la exploración ambiental y la recolección de datos en tiempo real.